Control of Mobile Robots- 2.2 Differential Drive Robots mouhknowsbest 8:13 11 years ago 108 692 Скачать Далее
Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation Aleksandar Haber 16:12 8 months ago 5 084 Скачать Далее
Ensemble Control: one set of primitives can be scaled to move ensemble anywhere in Cartesian plane Aaron Becker 0:27 12 years ago 164 Скачать Далее
Range and Bearing Control of Many Differential-Drive Robots with Uniform Control Inputs Aaron Becker 1:33 11 years ago 6 562 Скачать Далее
Position control of a differential drive wheeled mobile robot v1 Gerardo Ort T 0:39 4 years ago 85 Скачать Далее
Path Tracking Control of a Differential Drive Robot using MATLAB & SImulink Aaron Díaz 0:13 4 years ago 2 534 Скачать Далее
Controlling many differential-drive robots with uniform control inputs IJRR Multimedia 0:54 9 years ago 204 Скачать Далее
Approximate Steering of a Unicycle Under Bounded Model Perturbation Using Ensemble Control Aaron Becker 1:22 12 years ago 495 Скачать Далее
Feedback Control of Many Differential-Drive Robots with Uniform Control Inputs Aaron Becker 1:55 12 years ago 1 401 Скачать Далее
Simple trajectory control simulation for a differential drive robot Remi Fabre 0:42 6 years ago 120 Скачать Далее
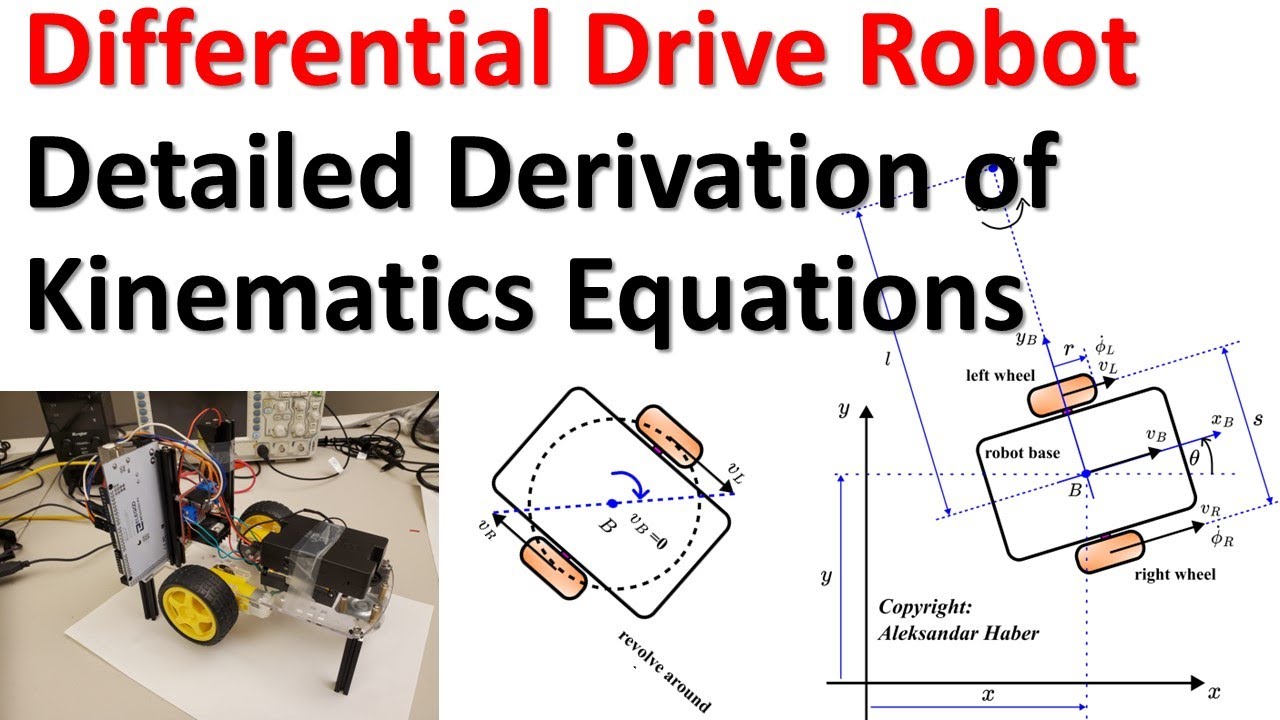
Detailed and Correct Derivation of Kinematics Equations of Differential Drive Mobile Robot Aleksandar Haber 16:28 8 months ago 5 248 Скачать Далее
Model Predictive Control for Differential Drive Robot Stephen Smith 0:40 9 years ago 777 Скачать Далее